引言
在24年4月11日的华为春季鸿蒙生态春季交流会中,余总说视觉智驾方案——HUAWEI ADS 基础版已经搭载至智界S7。在我看来,这是将智驾感知模块输入源给完善,你说智驾包贵,那我们就出个基础版;你说激光雷达易受天气影响,那我们就缺陷补偿,提供视觉识别方案。当然,有些朋友可能觉得激光雷达和视觉识别结合起来不是更好?这里面用计算机语言来讲,INPUT不一样,判断规则不一样,涉及到的0/1判断就比较多(白话就是,可以,但没必要)。所以合在一起,目前来看除了提高成本,降低效率之外没有特别大的用处。相信未来随着技术的发展,鱼与熊掌都可兼得。
写这篇文章主要是兑现下之前的承诺,也顺便普及下视觉识别和激光雷达——智驾里感知模块最重要的输入源没有之一(除非后面车皮用感知皮肤,如传感器链接到人那种)!本文将从视觉识别和激光雷达的区别对比,会对视觉识别和激光雷达多维进行评分,在智驾中的定位以及未来可能趋势阐述。另外,今天恭喜下持有赛力斯的朋友们!虽然被冲击的略有回落,但没有对比就没有伤害,至于对比谁,放眼望去,皆是牛马!
视觉识别和激光雷达的区别
一、视觉识别原理阐述
计算机视觉则侧重于从二维图像中提取信息,通过机器学习和深度学习算法分析图像中的像素数据,以识别物体、追踪运动或重建三维场景,视觉识别的核心在于如何有效地从图像数据中提取有意义的信息,并将其转化为可理解的形式。随着深度学习技术的发展,计算机视觉领域已经取得了显著的进步,使得视觉识别在许多应用中变得更加准确和可靠。具体是指使用算法和模型来解析和理解图像或视频中的内容。这一过程通常涉及以下几个关键步骤,以实现从原始像素到有意义解释的转换:
1. 图像获取:首先,通过摄像头或其他成像设备捕获图像或视频。这些图像以数字形式表示,其中每个像素包含颜色(通常是红、绿、蓝三原色)的强度信息。
2. 预处理:为了提高后续处理的效率和准确性,对图像进行预处理,包括调整大小、裁剪、去噪、归一化等操作。这些步骤有助于减少变异性和不相关的信息。
3. 特征提取:从预处理后的图像中提取有用的信息或“特征”。这些特征应该能够有效地表示图像的关键属性,如边缘、角点、纹理等。在深度学习模型中,特征提取通常是通过卷积神经网络(CNN)自动完成的。
4. 分类/识别:使用机器学习或深度学习模型对提取的特征进行分析,以识别图像中的对象、场景或活动。这一步骤可能涉及到分类(确定图像属于预定义类别中的哪一个)、检测(识别图像中对象的位置)或分割(将图像分割成多个区域,每个区域对应不同的对象或背景)。
5. 后处理:根据需要,对识别结果进行进一步的处理,如非最大抑制(NMS)来去除重复的检测框,或使用跟踪算法在视频中跟踪对象。
6. 解释和决策:最后,将识别和分类的结果转化为可用的信息或直接用于决策。例如,在自动驾驶汽车中,这可能意味着根据识别到的行人、车辆和交通标志来调整车辆的行驶路径。

二、激光雷达阐述
激光雷达的全称为Light Detection and Ranging,即激光探测和测距。它的工作原理激光雷达基于时间飞行(Time of Flight, TOF)原理,通过发射激光并测量光脉冲往返时间来计算距离。它能够生成高精度的三维点云图,用于精确地建模和测量物体的位置和形状。具体来看,激光雷达通过发射激光脉冲,并测量光脉冲从发射到被反射回的传播时间,从而计算出距离。由于光速是已知的,传播时间即可被转换为对距离的测量。结合激光器的高度、扫描角度、从GPS得到的激光器的位置和从INS得到的激光发射方向,就可以准确地计算出每一个目标点的坐标X,Y,Z。主要有以下步骤:
1. 发射激光脉冲:激光雷达设备通过激光发射器向目标发射一束或多束激光脉冲。这些激光脉冲具有非常高的方向性和能量集中性。
2. 激光与目标相互作用:发射的激光脉冲到达目标后,部分光能会被目标反射回来,而另一部分可能被吸收或散射。
3. 接收反射光脉冲:激光雷达设备中的接收器(通常是光电探测器)捕获从目标反射回来的激光脉冲。
4. 计算时间差和距离:通过测量激光脉冲从发射到接收的时间差,可以计算出激光脉冲往返目标的距离。距离的计算公式为:\距离 = \frac{光速 \times 时间差}{2}\]。这里除以2是因为激光脉冲需要往返一次。(这个公式用于计算激光雷达(LIDAR)测量的距离。公式的意思是,测量的距离等于光速乘以激光脉冲从发射到被目标反射回来的时间差,再除以2。这里的除以2是因为激光脉冲需要走一次去程和一次回程,所以实际测量的距离是往返距离的一半。)
光速:光在真空中的速度,大约是每秒299,792,458米(约3.00×10^8米/秒)。在大气中,光速略有减小,但通常我们使用真空中的光速进行计算,因为差异非常小。
时间差:激光脉冲从发射器发射出去,到被目标反射回来,再被激光雷达的接收器接收到的总时间。
将这两个值代入公式中,就可以计算出激光雷达与目标之间的距离。这个原理是基于光(激光)传播速度是恒定的这一物理定律。通过测量光传播的时间,我们可以很精确地计算出它所走过的距离。
5. 数据处理和分析:通过对多个激光脉冲的距离测量进行处理和分析,可以构建目标的三维形状、表面特征等信息。在不同的应用中,激光雷达还可以测量目标的速度(通过多普勒效应)和其他属性。

视觉识别和激光雷达分别的优劣势
定量
视觉识别和激光雷达(LIDAR)是两种不同的技术,它们在感知环境和获取信息的方式上有本质的区别,在这里我查阅了很多的资料包括国内外论文,从五个维度来阐述其优劣势以及评分(你觉得主观就主观把,尽量做到客观):
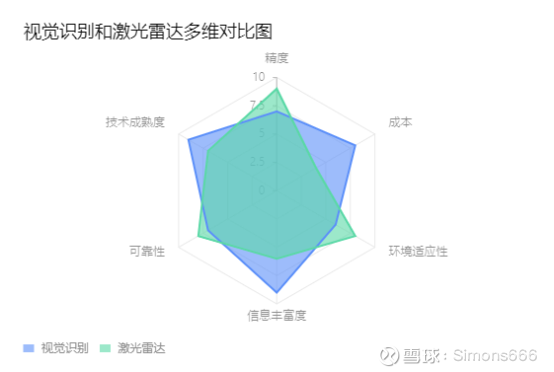
成本(Cost)
- 视觉识别:视觉识别主要依赖于摄像头和计算资源,其中高质量的摄像头成本相对较低,计算资源的成本随技术发展而逐渐降低。评分:8
- 激光雷达:激光雷达设备成本较高,尽管随着技术进步和生产规模扩大,成本有所下降,但整体上仍然显著高于视觉识别系统。评分:4
精度(Accuracy)
- 视觉识别:视觉识别的精度受到多种因素的影响,包括图像质量、算法性能等,对于特定任务可以达到很高的精度,但在复杂环境下可能会受限。评分:7
- 激光雷达:激光雷达在测量距离和构建三维地图方面提供了非常高的精度,尤其是在物体定位和环境建模方面。评分:9
环境适应性(Environmental Adaptability)
- 视觉识别:视觉识别系统在光照变化大、视野被遮挡等情况下的表现可能会下降,对环境条件较为敏感。评分:6
- 激光雷达:激光雷达对光照条件依赖较小,能够在夜间以及恶劣天气条件下稳定工作,但在极端天气如浓雾中性能可能受限。评分:8
信息丰富度(Information Richness)
- 视觉识别:视觉识别能够提供颜色、纹理等丰富的视觉信息,有助于识别物体和理解场景。评分:9
- 激光雷达:激光雷达主要提供距离和形状信息,缺乏颜色和纹理信息,信息维度相对有限。评分:6。
可靠性(Reliability)
- 视觉识别:可能受到光照、遮挡等因素的影响,可靠性在复杂环境下可能下降。
- 激光雷达:通常提供较高的可靠性,特别是在距离测量和物体检测方面,但在某些极端天气条件下性能可能受限。
技术成熟度(Technological Maturity)
- 视觉识别:得益于深度学习等技术的快速发展,视觉识别技术已相对成熟,应用广泛。评分:9
- 激光雷达:虽然在某些领域如测绘和自动驾驶中已被广泛应用,但相对于视觉识别,某些高性能激光雷达技术的成熟度和普及率可能较低。评分:7
定性
视觉识别
优势:
- 丰富的信息:提供颜色、纹理等丰富的视觉信息,有助于识别物体、场景和活动。
- 成本效益:相对于激光雷达,摄像头成本较低,易于大规模部署。
- 成熟的算法:深度学习和其他机器学习技术的发展使得视觉识别算法越来越准确和强大。
劣势:
- 光照依赖:性能受光照条件影响较大,如夜间或逆光情况下识别能力下降。
- 视角限制:受摄像头视角和遮挡的限制,可能无法完整捕捉到场景信息。
激光雷达
原理:发射激光脉冲并测量反射回来的光脉冲,以此计算物体的距离和形状,构建三维模型。
优势:
- 精确的距离测量:能够非常精确地测量物体的距离,生成高精度的三维地图。
- 光照条件影响小:不依赖外部光照条件,即使在夜间或恶劣天气下也能稳定工作。
- 避障能力强:特别适合于自动驾驶等需要精确避障的应用场景。
劣势:
- 成本较高:相比于摄像头,激光雷达的成本较高,限制了其在某些领域的广泛应用。
- 缺乏颜色信息:无法提供颜色或纹理信息,对于某些需要细致视觉识别的应用场景可能不够理想
视觉识别和激光雷达在行业领域中的应用
通过上述的区别以及优劣势分析,查阅当前新闻以及相关论文资料,其实就目前应用来看,视觉识别是辅助决策,而激光雷达更适合做一些精度要求较高的比如避障等。目前视觉识别和激光雷达在行业领域中主要有:
视觉识别的应用领域
1. 安全监控:利用视觉识别技术进行人脸识别、行为分析,用于安全监控和公共安全。
2. 工业自动化:在制造业中,视觉识别用于质量检测、部件识别和自动化装配线的视觉引导。
3. 零售:通过识别顾客的行为和偏好,提供个性化的购物体验,以及在无人零售中进行商品识别和结算。
4. 医疗影像分析:用于分析X光片、MRI等医疗影像,辅助诊断疾病。
5. 自动驾驶:结合其他传感器数据,用于识别交通标志、行人、车辆等,辅助驾驶决策。
激光雷达的应用领域
1. 自动驾驶:提供精确的距离测量和三维环境建模,用于车辆定位、障碍物检测和路径规划。
2. 地形测绘:在地理信息系统(GIS)中,用于高精度的地形、植被和建筑物测绘。
3. 机器人导航:在仓库和制造业中,激光雷达用于机器人的定位和避障,实现自主导航。
4. 风力发电:通过测量风速和风向,优化风力发电机的性能。
5. 考古和文化遗产保护:用于扫描古迹和遗址,创建精确的三维模型,用于研究和保护。
视觉识别和激光雷达在智驾领域的应用原理和区别
在智驾领域中,两者定位都作为感知层重要的输入源,其实流程是差不多的,但在处理方式上还是有很大的区别。
视觉识别在智驾领域的应用原理
视觉识别技术依赖于摄像头来捕获车辆周围的图像或视频。通过深度学习等机器学习算法,系统能够识别和理解图像中的各种对象,如行人、车辆、交通标志和道路线条等。视觉识别系统通常包括以下步骤:
1. 图像捕获:使用一个或多个摄像头从不同角度捕获车辆周围的环境。
2. 图像预处理:对捕获的图像进行处理,如调整大小、裁剪、增强对比度等,以提高后续处理的效率和准确性。
3. 特征提取和识别:使用深度学习模型从预处理后的图像中提取特征,并识别图像中的对象和场景。
4. 决策和行动:根据识别结果,自动驾驶系统做出驾驶决策,如变道、减速或避障。
激光雷达在智驾领域的应用原理
激光雷达通过发射激光脉冲并测量反射回来的光脉冲来获取车辆周围环境的三维信息。这些信息用于构建高精度的三维地图,帮助车辆精确定位自身及周围物体的位置和形状。激光雷达的工作流程包括:
1. 激光发射:激光雷达发射大量激光脉冲,覆盖车辆周围的环境。
2. 激光反射和接收:激光脉冲击中周围物体并反射回来,被激光雷达的接收器捕获。
3. 距离测量:通过计算激光脉冲发射和接收之间的时间差,确定激光与物体之间的距离。
4. 三维建模:根据测量的距离数据,构建周围环境的三维模型,用于障碍物检测和路径规划。
最终这些反馈回来的输出都将反馈至智驾系统也就是核心处理层,来做核心判断,相信不久的将来会涌现更多的智驾应用场景。因此,视觉识别和激光雷达的结合使用是智能驾驶技术发展的一个重要趋势,但就目前情况还存着一些技术壁垒。目前业界也在通过多传感器融合技术,可以整合来自不同传感器的数据,实现更高级别的自动驾驶功能。不过,要实现这些技术的有效融合,还需要解决数据处理和融合算法的挑战,确保不同来源的数据能够被准确、实时地整合和利用。
未来两者可能的发展趋势
综上所述,我们有理由判断出,未来两者可能的发展趋势主要由以下方面:
技术融合优化(重要)
- 深度融合:未来,视觉识别和激光雷达的数据融合将更加深入,不仅在数据层面进行融合,还将在特征层面和决策层面实现更深度的集成,以提高感知系统的准确性和鲁棒性。
- 算法优化:随着人工智能和机器学习技术的发展,针对视觉识别和激光雷达数据融合的算法将更加高效和精确,能够实时处理大量复杂数据,提高自动驾驶系统的决策速度和安全性。
成本降低和普及(提高利润)
- 成本效益:随着生产规模的扩大和技术的成熟,激光雷达的成本将进一步降低,使得结合视觉识别和激光雷达的智能驾驶系统更加经济实用,加速其在汽车市场的普及。
- 集成设计:未来的智能驾驶汽车将更加注重传感器的集成设计,通过优化车辆设计和传感器布局,实现更高效的数据采集和处理,同时降低系统的整体成本。
功能拓展与应用创新
- 更广泛的应用场景:随着技术的进步,结合视觉识别和激光雷达的智能驾驶系统将能够适应更加复杂多变的驾驶环境,如复杂的城市交通、恶劣的天气条件等,拓展自动驾驶的应用场景。
- 新功能开发:基于视觉识别和激光雷达数据的深度融合,未来的智能驾驶系统将开发出更多创新功能,如更精确的行人和动物检测、复杂交通场景的理解、自动紧急避险等,提高自动驾驶的安全性和舒适性。
标准化与安全性
- 数据和安全标准:随着智能驾驶技术的发展,相关的数据处理和安全标准将逐步建立和完善,确保视觉识别和激光雷达数据的有效融合,同时保障系统的安全可靠。
- 隐私保护(这一点我相信每个开车的人都想技术进步):在利用视觉识别技术进行环境感知的同时,未来的智能驾驶系统将更加注重个人隐私的保护,采取有效措施避免敏感信息的泄露。
总结
华为在视觉识别和激光雷达的布局完善了感知层的输入源,处理层和输出层是华为的拿手戏。那么作为标杆的赛力斯完全不惧短期涨跌,坐看众生相即可。
修心唯有宋代苏洵《心术》一句以蔽之:泰山崩于前而色不变,麋鹿兴于左而目不瞬,然后可以制利害,可以待敌。修行则有于谦《石灰吟》:千锤万凿出深山,烈火焚烧若等闲。众生,且看龙吟!
$赛力斯(SH601127)$ $华为汽车(BK0746)$