第一性原理告诉我:端到端,一定是最优解。
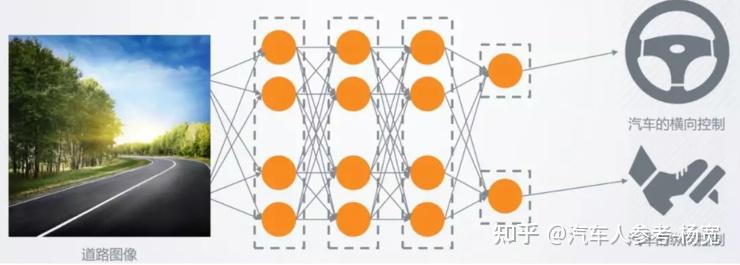
端到端自动驾驶,简单来说,就是从传感器输入(video in)到车辆行动(action out)的全过程,都由一个统一的、高度集成的AI模型来控制,没有中间的人工干预或分段处理。这种做法的最大优势在于其连贯性和高效性,如果把自动驾驶系统分成多个独立的模块,感知、决策、控制等,那么每个模块之间的数据交换和决策同步就会成为瓶颈。而端到端的做法则避免了这一问题,使得整个系统能够作为一个整体进行高效运作。
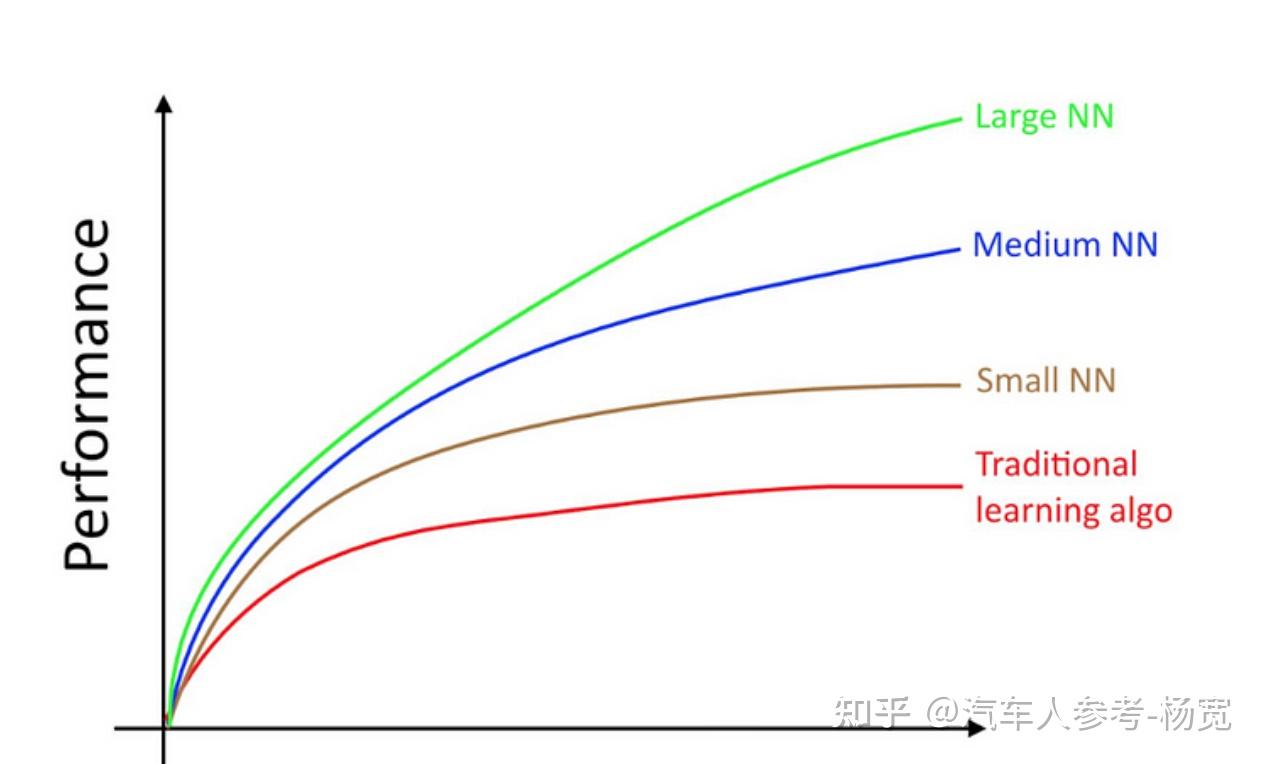
从Scaling law的角度来看,端到端的设计也更有利于自动驾驶技术的快速发展和普及。scaling law指的是随着数据量的增加,模型性能也会相应提升的规律。在自动驾驶领域,这一规律尤为明显。因为只有端到端的系统,才能充分利用大量的真实世界数据来训练和优化模型。而分段处理的系统,由于数据在各个模块之间的传递和转换,往往会造成信息损失,从而限制了模型性能的提升。
此外,端到端的设计还有助于提高自动驾驶系统的鲁棒性和安全性。因为在一个完整的系统中,各个部分都是相互依赖、相互影响的。当某个部分出现问题时,其他部分可以通过调整来弥补这一缺陷,从而保持整个系统的稳定运行。而分段处理的系统,由于各个模块之间的独立性,往往难以做到这一点。
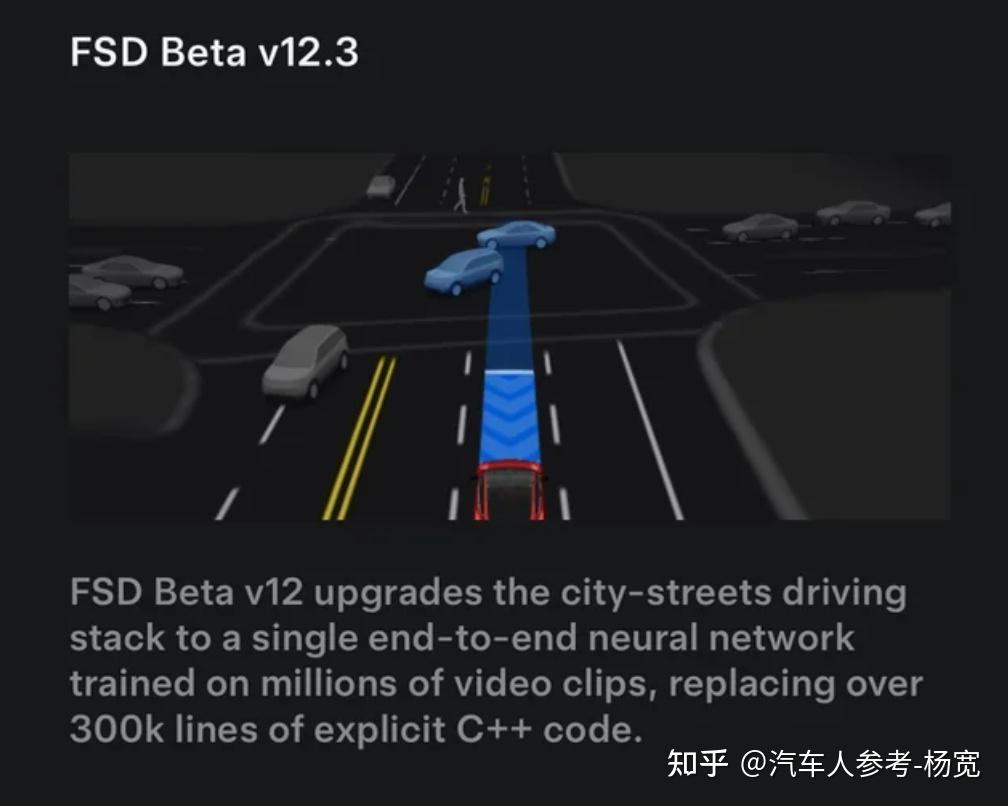
特斯拉FSD V12就是这一技术路线的典型代表。它完全采用神经网络进行车辆控制,从机器视觉到驱动决策都由神经网络来控制。这种端到端的自动驾驶系统,就像是一个“万能老司机”,能够感知和理解现实世界的复杂性,做出复杂的驾驶决策。而且,FSD V12还通过海量的驾驶数据训练,实现了scaling law,也就是说,随着数据量的增加,系统的性能会持续提升,而不需要对系统进行大规模的改动。
特斯拉FSD入华在即,这是一个重要的里程碑。而端到端的自动驾驶方案,无疑是当前技术路径下的最优解,我认为端到端特是自动驾驶量产上路的必然之路。特斯拉FSD的入华,将为我们提供一个绝佳的展示端到端技术的机会。